Datenaustausch
Interne Datenverarbeitung
Die Firmware des OBP40 besteht aus zwei Teilen. Der erste Teil ist das NMEA2000-Gateway und der zweite Teil die Hardwareansteuerung des OBP40. Das NMEA2000-Gateway ist ein Open Source Projekt von Andreas Vogel. Es ist eine Software, mit der man bidirektionale Datenkonvertierungen zwischen NMEA2000 und NMEA0183 durchführen kann. Die Software ist so gestaltet, dass sie unterschiedliche kommerzielle Hardware unterstützen kann. So läuft das NMEA2000-Gateway z.B. auf einer Reihe von Produkten der Firma M5Stack wie dem M5Stack Atom, aber auch auf ESP32-Entwicklerboards wie dem ESP32 Node MCU. Es werden ESP32-CPUs in unterschiedlicher Ausprägung unterstützt wie der ESP32-Wroom und der ESP32-S3. Die Hardwareansteuerung des OBP40 ist über eigenständige Tasks implementiert und nutzt die Grundfunktionalität des NMEA2000-Gateways.
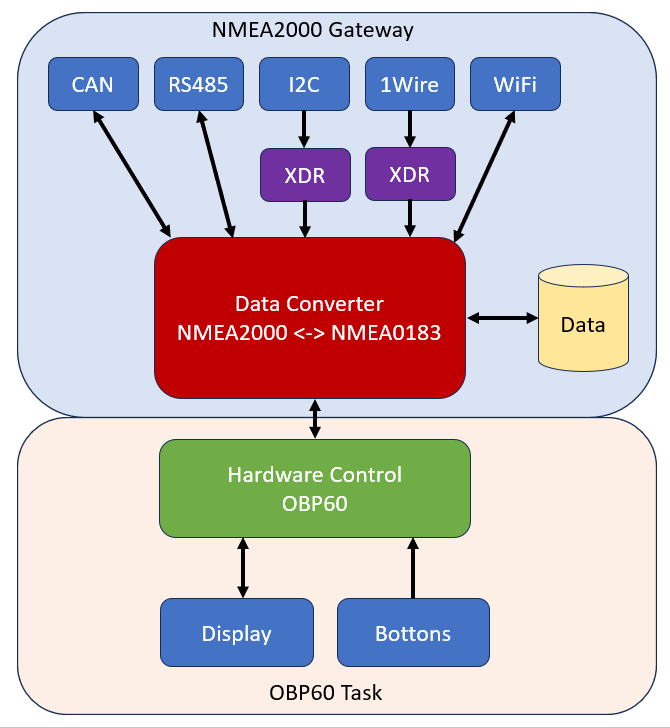
Abb.: Datenflussschema
Die gesamte Datenverarbeitung sämtlicher Bussysteme und Konvertierungen ist Bestandteil des NMEA2000-Gateways. Neben NMEA2000 (CAN) und NMEA0183 (RS485) werden weitere Bussysteme wie I2C und 1Wire unterstützt. Die Hauptaufgabe des NMEA2000-Gateways besteht darin, alle ankommenden Daten der Bussysteme zu empfangen und in einem gemeinsamen Daten-Pool abzubilden. Diese Daten können über die Webseite Data eingesehen werden. Erweiterte Sensorik, die nicht Bestandteil von NMEA2000 und NMEA0183 sind, kann über I2C und 1Wire eingefügt werden. So lassen sich preisgünstige Sensoren nutzen. Damit die Daten der erweiterten Sensorik im NMEA2000- und NMEA0183-Netzwerk genutzt werden können, werden sie über NMEA0183 als universelle XDR-Datensätze in den Daten-Pool eingefügt. Als XDR-Datensätze können die Daten dann auch nach NMEA2000 konvertiert werden, sofern im Konverter entsprechende Übersetzungen implementiert sind. Als Ausgabeschnittstellen stehen CAN, RS485 und WiFi zur Verfügung. Über die CAN-Schnittstelle lassen sich nur NMEA2000-Daten austauschen. Über RS485 und WiFi (TCP) lassen sich sowohl NMEA0183-Daten, als auch NMEA2000-Daten austauschen, sofern die NMEA2000-Daten in SeaSmart-Telegrammen durch NMEA0183 getunnelt werden.
Der Datenaustausch im OBP40 kann auf verschiedene Weise erfolgen. Grundsätzlich stehen mehrere Übertragungsarten über verschiedene Übertragungswege zur Verfügung:
Übertragungsarten
- Simplex
Daten können in nur eine Richtung übertragen werden
- Halbduplex
Daten können abwechselnd, aber nicht gleichzeitig, in beide Richtungen fließen
- Vollduplex
Daten können in beide Richtungen gleichzeitig übertragen werden.
Übertragungswege
- NMEA2000
Kabelgebunden NMEA2000-Bus (halbduplex)
Über WiFi via SeaSmart (vollduplex)
- NMEA0183
Kabelgebunden NMEA0183-Bus (simplex)
USB (vollduplex)
Über WiFi via TCP (vollduplex)
I2C (halbduplex)
1Wire (halbduplex)
Datenquellen
Als Datenquellen werden Geräte bezeichnet, die überwiegend Daten zur anderen Geräten senden und selber nur Daten zur Parametrierung empfangen. Dazu zählen folgende Geräte:
GPS-Empfänger (Position, Geschwindigkeit, Richtung)
Windsensor (Geschwindigkeit, Richtung, Temperatur)
Tiefen-Sensor (Tiefe, Geschwindigkeit, Wassertemperatur, zurückgelegte Strecke)
Winkelsensoren (Ruderlage, Mast, Großbaum, Foil, Trimmklappen)
Elektro-Sensor (Spannung, Strom, Leistung, Energie)
Umgebungssensoren (Lufttemperatur, Luftdruck, Luftfeuchtigkeit, Helligkeit, Niederschlag, Zustand, Bewegung)
Durchflusssensoren (Kühlwasserfluss, Kühlwassertemperatur)
Druck- und Zugsensoren (Öldruck, Achterstag, Vorstag)
Füllstandsensoren (Level für Wasser, Abwasser, Kraftstoff)
Lagesensoren (Roll-, Pitch-, Nick-Winkel, Beschleunigung, Rotation, Magnetfeld)
Temperatursensoren (Luft, Kühlwasser, Raum, Kühlschrank, Wasser, Maschinenraum)
Elektrogeneratoren (Solar, Wind-, Schlepp- Dieselgenerator)
Radargeräte (Umgebungskarte)
Funkgeräte (Position, AIS-Schiffsverkehr, Anrufer, Meldungen, Notrufe)
Anzeigegeräte (Multifunktionsdisplays, Plotter)
Videokameras (Bild, Ton, Bewegung)
Datensenken
Datensenken empfangen Informationen und führen bestimmte Aktionen aus.
Ruder-Aktuator (linear, rotatorisch, hydraulisch, elektrisch)
Relais und Schalter (elektrische Verbraucher wie Ankerwinde, Licht, Positionsleuchten, Lüftung, Heizung, Ladegeräte)
Winkelaktuator (Trimmklappen, Foil-Einstellung)
Anzeigegeräte (Multifunktionsdisplays, Plotter)
Multimediageräte (Radio, Lautsprecher)
Einige komplexere Geräte können sowohl Datenquelle, als auch Datensenke sein wie z.B. Multifunktionsdisplays oder Plotter.
Nachfolgend werden die Übertragungswege näher beschrieben.
NMEA2000 - Kabelgebunden
Der kabelgebundene NMEA2000-Bus ist der aktuelle Standard in der Bootsvernetzung. Über ein NMEA2000-Backbone auf CAN-Basis werden verschiedene Geräte an das Bussystem angeschlossen. Alle Bus-Teilnehmer können Daten lesen und schreiben. Dabei sind Sensoren Datenlieferanten, die ihre Daten an Displays und Plotter übertragen. Das NMEA2000-Backbone kann Sensoren auch mit Strom versorgen. Die Einspeisung der Versorgungspannung erfolgt über einen Plotter oder über ein Einspeisekabel.
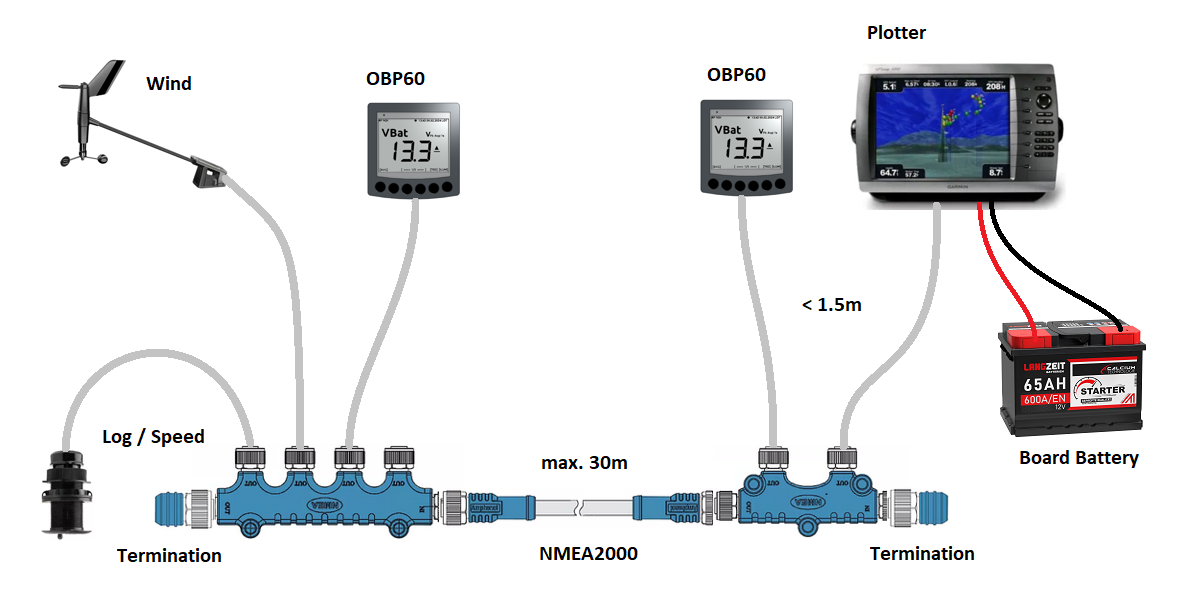
Abb.: NMEA2000-Bussystem mit Sensoren und Anzeigegeräten
Für den Betrieb von NMEA2000 muss nichts speziell konfiguriert werden. Die Standardeinstellungen sind so gesetzt, dass ein Betrieb problemlos möglich ist. Bei Bedarf kann das Senden von NMEA2000-Telegrammen unterbunden werden. Dann ist nur ein Empfang von NMEA2000-Telegrammen möglich. Die Einstellungen zu NMEA2000 findet man unter Config - Converter.
NMEA2000 - WiFi via SeaSmart
Über das SeaSmart-Protokoll besteht die Möglichkeit, NMEA2000-Telegramme über Ethernet und WiFi zu übertragen. Dazu werden die Binärdaten der NMEA2000-Telegramme in proprietäre NMEA0183-Telegramme eingebettet. Ein SeaSmart-Telegramm sieht wie folgt aus:
$PCDIN,a–a,b–b,b,cc,d–d*hh<CR><LF>
- Feldnummer:
a - PGN im Binärform
b - Zeitstempel im Binärform
c - Source-ID
d - PGN-Daten im Binärform
hh - Checksumme
- Beispiel:
$PCDIN,01F211,0B9CF01B,03,008061480D0000FF*5C
Der Vorteil ist, dass sich SeaSmart-Telegramme genauso wie NMEA0183-Telegramme übertragen lassen. Damit ist es möglich, NMEA2000-Telegramme drahtlos über Wifi von einem OBP40 zu einem anderen OBP40 zu übertragen. Diese Funktion kann z.B. genutzt werden, um Bus-Sensordaten von einem OBP40 oder einem NMEA2000-Gateway auf einem OBP40-Tochtergerät anzeigen zu lassen.
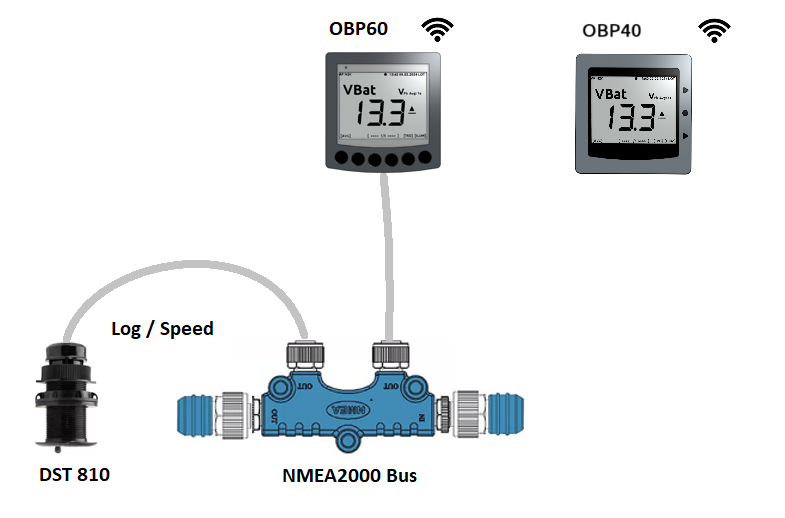
Abb.: Datenübertragung via WiFi OBP60 - OBP40
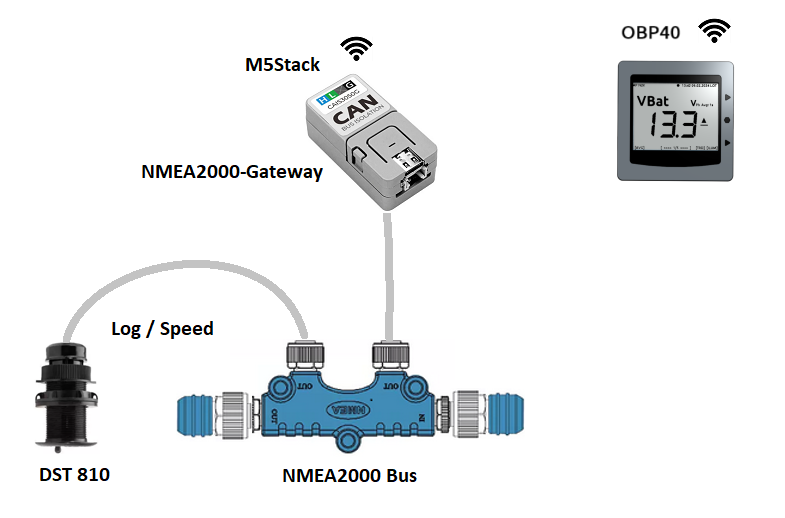
Abb.: Datenübertragung via WiFi M5Stack - OBP40
Hinweis
Beide Geräte müssen sich im selben WiFi-Netzwerk befinden und unterschiedliche Netzwerknamen und IP-Adressen besitzen. Dabei muss ein Gerät als TCP-Server und das andere Gerät als TCP-Client konfiguriert sein und auf beiden Geräten SeaSmart out aktiviert werden.
Nachfolgend ist ein Konfigurationsbeispiel für die obere Abbildung gezeigt, in dem ein Datenaustausch über WiFi zwischen einem OBP60 und einem OBP40 stattfindet. Das Gerät 1 ist dabei als TCP-Server und Gerät 2 als TCP-Client konfiguriert. Das Gerät 2 bucht sich in das WiFi-Netzwerk vom Gerät 1 ein und tauscht darüber bidirektional Daten aus.
Einstellung |
Gerät 1 |
Gerät 2 |
|---|---|---|
System Name |
OBP60V2 |
OBP40V1 |
ApPassword |
11111111 |
22222222 |
ApIP |
192.168.15.1 |
192.168.16.1 |
SeaSmart Out |
on |
off |
Enable |
off |
on |
Remote Address |
— |
192.168.15.1 |
SeaSamart Out |
off |
on |
WiFi Client |
off |
on |
WiFi Client SSID |
— |
OBP60V2 |
WiFi Client Password |
— |
11111111 |
NMEA0183 - Kabelgebunden
Bei der kabelgebundenen Datenübertragung für NMEA0183 handelt es sich um eine Simplex-Übertragung. Das bedeutet, dass man entweder senden oder empfangen kann. Als Default ist das OBP40 auf Empfang eingestellt. Es ist aber auch möglich, NMEA0183-Daten zu senden. Die Einstellung dazu erfolgt unter Config - Serial Port. Über Serial Direction kann die Datenrichtung eingestellt werden.
An dieser Stelle wird ein Beispiel gezeigt, wie Daten von einem NMEA0183-Multiplexer in ein OBP40 eingebunden werden können. Dabei sammelt der Multiplexer alle Sensordaten über die Eingänge ein und erzeugt einen zusammengefassten Datenstrom an seinem Ausgang. Die Daten werden lesend vom OBP40 empfangen und können dann entsprechend verwendet werden.
Bemerkung
Die Konfiguration des Multiplexers ist vom Modell abhängig. Konsultieren Sie dazu das Handbuch und achten Sie auf die korrekte Einstellung der Baudraten für die Eingänge und Ausgänge des Multiplexers.
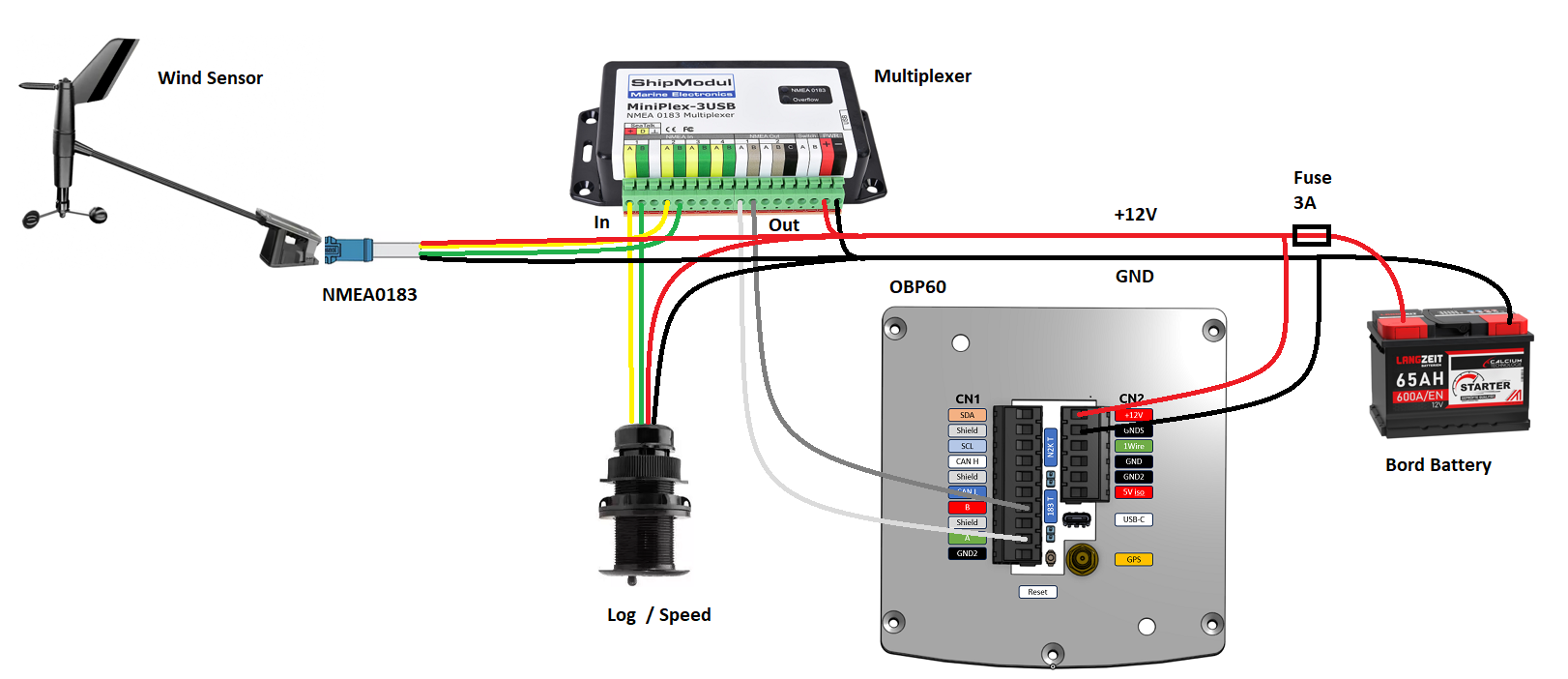
Abb.: NMEA0183-Verbindung eines OBP60 zu einem Multiplexer (empfangen)
Einstellung |
OBP60 |
|---|---|
Serial Direction |
receive |
Serial Baud Rate |
115200 |
Serial to NMEA2000 |
on |
Zum Senden von NMEA0183-Daten hier ein Beispiel für einen Autopiloten. Dabei werden Daten aus den verwendeten Kommunikationsmöglichkeiten genutzt und diese an einen Autopiloten gesendet. Die Ausgabe der Daten erfolgt über einen Filter, so dass nur relevante Informationen den Autopiloten erreichen. In dem gezeigten Beispiel verwendet der Autopilot einen NMEA0183-Eingang nach RS422 oder RS485 mit einer Schnittstellengeschwindigkeit von 4800 Bd. Unter Umständen müssen Sie die Geschwindigkeit an Ihren Autopiloten anpassen.
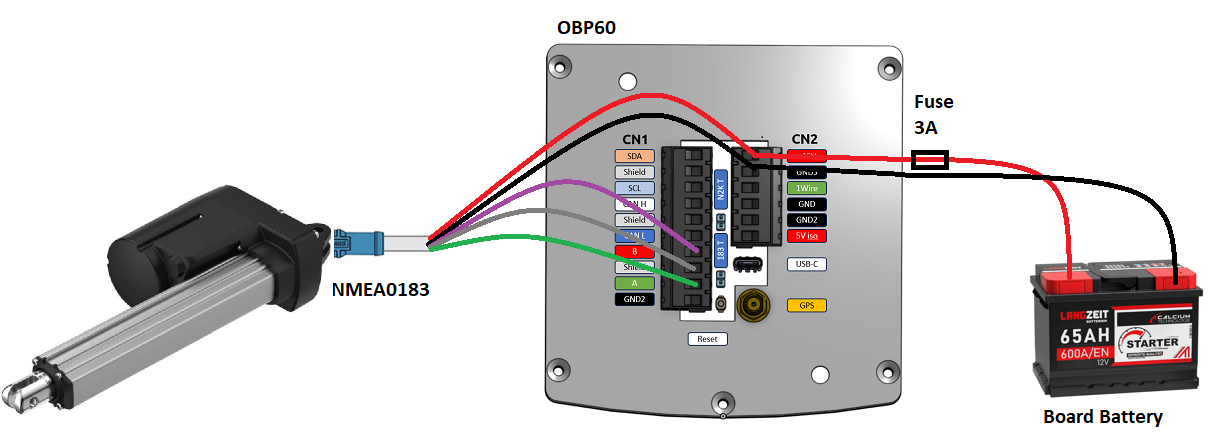
Abb.: NMEA0183-Verbindung eines OBP60 zu einem Autopiloten (senden)
Einstellung |
OBP60 |
|---|---|
Serial Direction |
send |
Serial Baud Rate |
4800 |
Serial to NMEA2000 |
on |
Serial Read Filter |
— |
Serial Write Filter |
XTE,XDR,RMB,RMC,ROT |
An den Autopiloten werden nur die NMEA0183-Telegramme XTE, XDR, RMB, RMC und ROT gesendet.
Bemerkung
Prüfen Sie in der Dokumentation des Autopiloten, ob die übermittelten NMEA0183-Telegramme zur Navigation verwendet werden können und ausreichend sind. In einigen Fällen kann es sein, dass der Autopilot andere Telegramme zur Kursregelung benutzt. In dem Fall kann der Autopilot nicht angesteuert werden.
NMEA0183 - USB

NMEA0183-Telegramme lassen sich auch über USB vollduplex übertragen. Das bedeutet, dass Daten gleichzeitig gesendet und empfangen werden können. Den USB-Port für die Datenübertragung findet man auf der linken Seite des OBP40. Er ist als USB-C ausgeführt. Die USB-Schnittstelle im OBP40 ist als serielles RS232 Device implementiert und unterstützt die Übertragungsgeschwindigkeiten 1.200…460.800 Bd. Die Defaulteinstellung für die Datenübertragung ist auf 115.200 Bd eingestellt und sollte für die meisten Anwendungen ausreichend schnell sein. Die Daten werden ausschließlich als NMEA0183-Daten über USB übertragen.
Als mögliche Endpunkte könnte folgende Hardware verwendet werden:
Raspberry Pi 3, 3B, 4B, 5
Android Autoradio
Laptop
PC
Die NMEA0183-Daten lassen sich in unterschiedliche Software einbinden wie:
AvNav
OpenPlotter
OpenCPN
BBN
SignalK
qtVlm
Navionics
WinGPS
NMEA Simulator
Für alle oben aufgeführten Endpunkte sind folgende Einstellungen im OBP40 vorzunehmen. Dabei werden NMEA0183-Daten auf der USB-Schnittstelle empfangen und gesendet und gleichzeitig nach NMEA2000 bidirektional konvertiert.
Einstellung |
OBP40 |
|---|---|
Log Level |
off |
USB Mode |
nmea0183 |
USB Baud Rate |
115200 |
NMEA to USB |
on |
NMEA from USB |
on |
USB to NMEA2000 |
on |
Hinweis
Achten Sie darauf, dass der Log Level auf off gestellt ist. Anderenfalls kann es sonst zu Störungen in der Kommunikation kommen, da Logging-Ausgaben in den Datenstrom eingespeist werden, die ebenfalls über USB-C ausgegeben werden.
NMEA0183 - WLAN
Mit dem TCP Client könenn (ähnlich wie bei der Übertragung per USB) NMEA0183-Telegramme z.B. von einem Raspberry Pi mit OpenPlotter bzw. SignalK empfangen werden. Dazu muss der TCP-Client entsprechend konfiguriert sein. Config - WiFi Client
Konfigurationsbeispiele
Nachfolgend sind einige Konfigurationsbeispiele aufgeführt. Es wird gezeigt, wie die weitere Konfiguration auf dem System erfolgt.
Beispiel AVnav auf Raspberry Pi
Dieses Beispiel zeigt die Einbindung eines OBP40 über USB in AvNav, das auf einem Rasberry Pi läuft. Dabei werden NMEA2000 Busdaten ausgelesen und nach NMEA0183 übertragen. Die Anbindung erfolgt direkt in AvNav als Device und die Daten stehen dann der Anwendung zu Verfügung. In diesem Fall wird das AvNav-Image benutzt. Wer AvNav unter OpenPlotter als Plugin benutzt, sollte dem Konfigurationsbeispiel OpenPlotter auf Raspberry Pi folgten.
Zur Verbindung des OBP40 und den Raspberry Pi über benötigen Sie ein USB-C zu USB-A Kabel. Am Raspberry Pi können Sie jeden beliebigen USB-A-Port verwenden.
Hinweis
Es ist ratsam, die schwarzen USB-A-Ports am Raspberry zu nutzen, da das OBP40 nur USB 1.1 unterstützt und dadurch die leistungsfähigeren USB 3.0-Ports frei bleiben und anderweitig genutzt werden können. Versorgen Sie auf jeden Fall das OBP40 zusätzlich mit 12V, da der Raspberry Pi zu wenig Strom an seinen USB-Ports liefert.
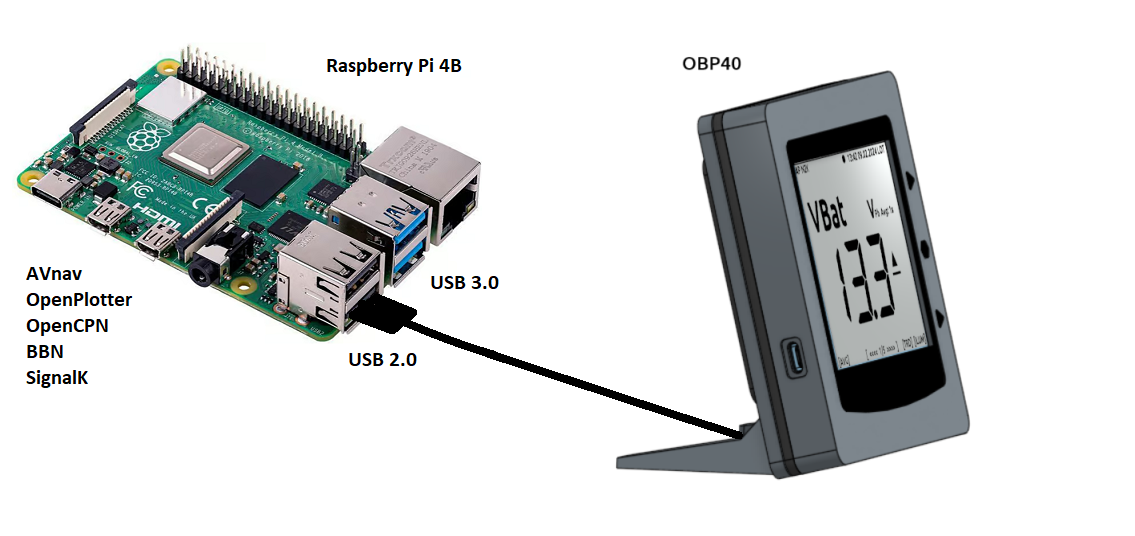
Abb.: Verbindung OBP40 - Raspberry Pi
Warnung
Verwenden Sie zur Verbindung des OBP40 mit dem Raspberry Pi nur hochwertige geschirmte USB-C-Kabel. Die Länge sollte 1,5 m nicht überschreiten, damit die Signalpegel nicht zu stark reduziert werden und eine hohe Übertragungsrate möglich ist. Bei Überbrückung größerer Längen verwenden sie aktive USB-Verlängerungskabel

Abb.: Aktive USB-Verlängerung für 5 m
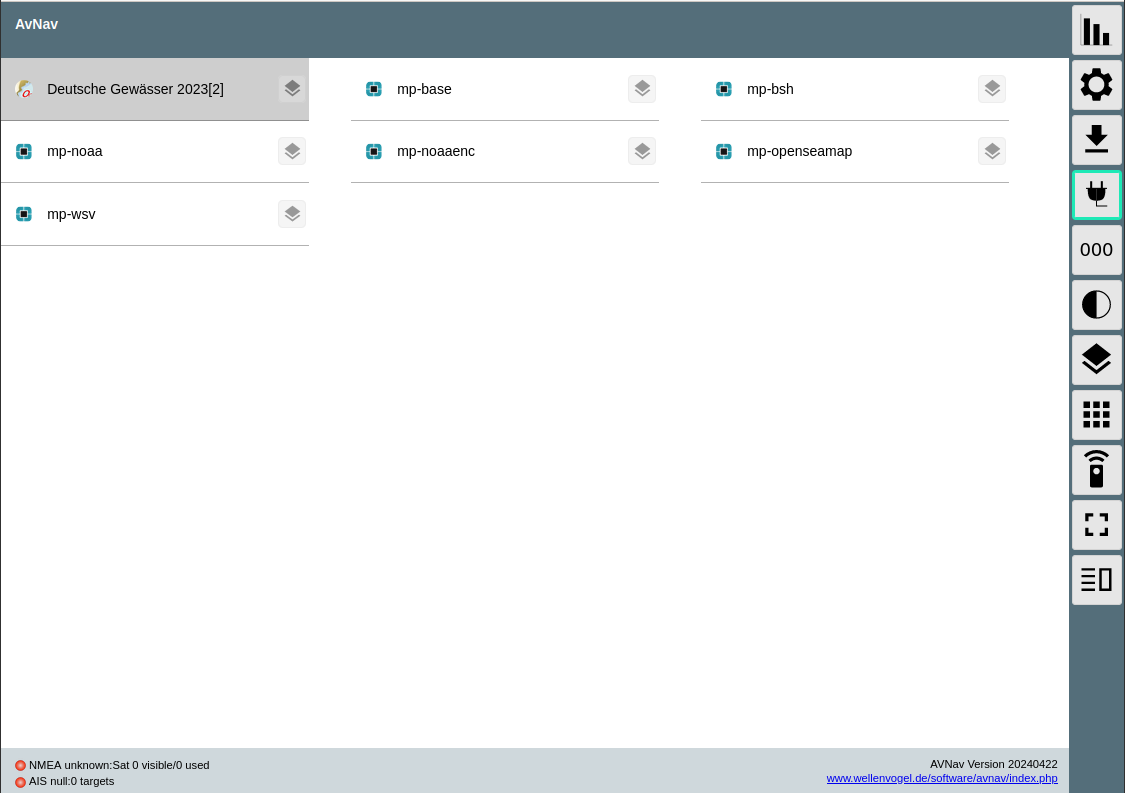
Abb.: AvNav Startseite
Unter AvNav kicken Sie auf der Startseite oben rechts das Symbol mit den 3 Strichen.
Sie gelangen dann auf die Seite zum Serverstatus.
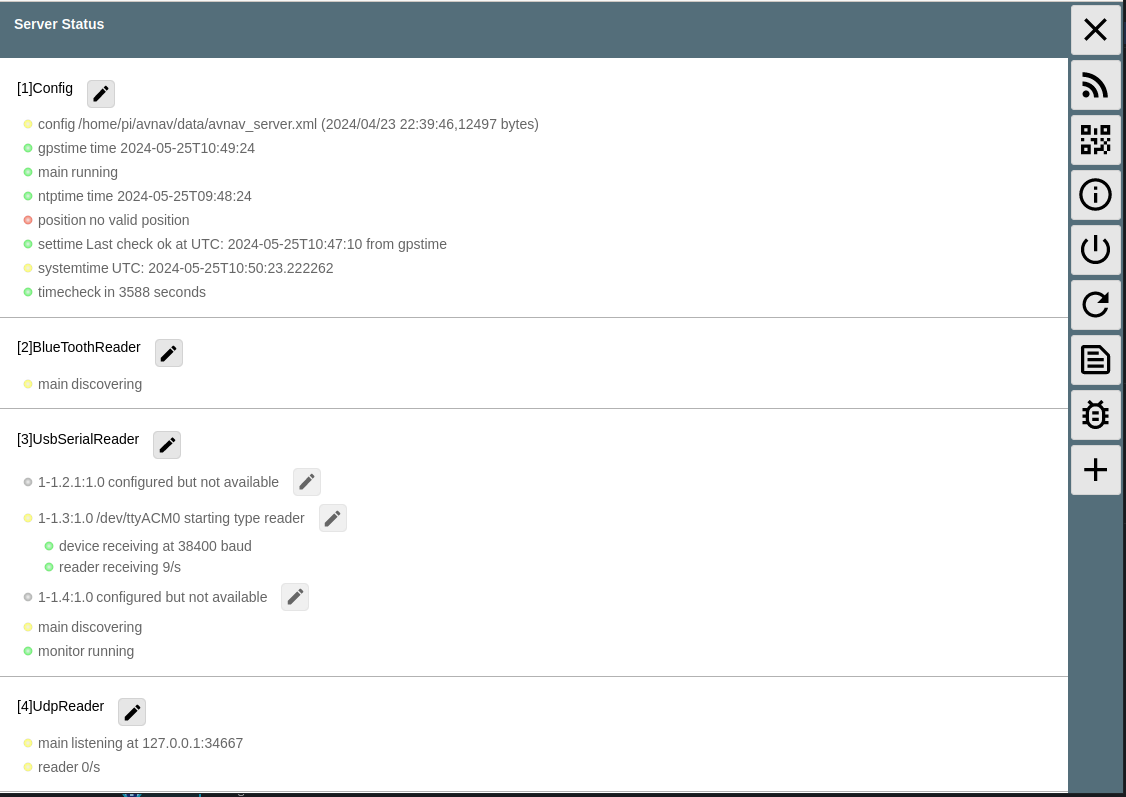
Abb.: Server-Status ohne OBP40
AvNav ist so eingerichtet, dass es automatisch alle seriellen USB-Geräte erkennen kann und automatisch zuordnet. Sowohl das Gerät, als auch die Übertragungsrate werden erkannt. Verschaffen Sie sich als erstes einen Überblick, welche Geräte bereits mit USB verbunden sind. Im oberen Bild sehen Sie unter Punkt [3] USBSerialReader alle aktuell erkannten und zugeordneten Geräte. In unserem Fall ist bereits ein GPS-Stick an USB angeschlossen. Das Gerät ist der Schnittstelle /dev/ttyACM0 zugeordnet und arbeitet mit einer Übertragungsrate von 38.400 Bd.
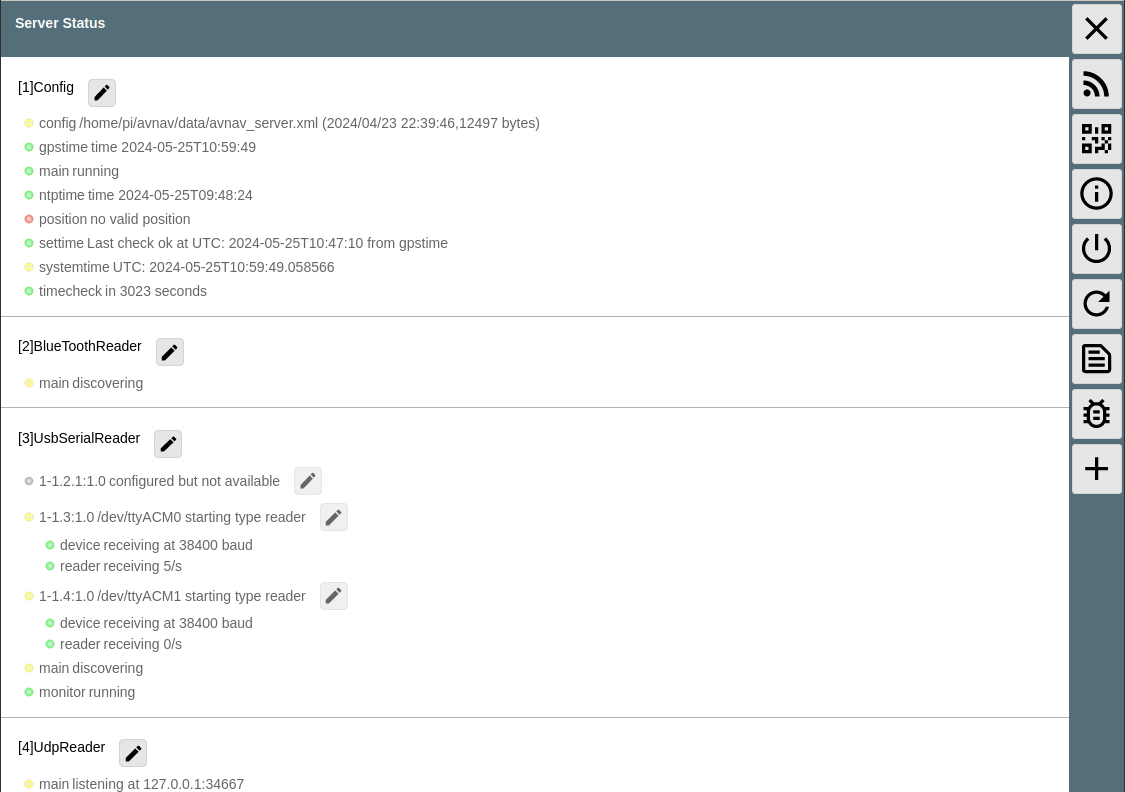
Abb.: Server-Status mit OBP40 (noch nicht konfiguriert)
Wenn man das OBP40 mit dem Raspberry Pi über USB verbindet, sieht man im oberen Bild unter Punkt 3 ein neu hinzugefügtes Gerät /dev/ttyACM1. Es handelt sich dabei um das OBP40. Die Schnittstellengeschwindigkeit ist aber noch nicht korrekt eingestellt.
Wenn Sie auf das Stiftsymbol hinter der Zeile mit dem Eintrag /dev/ttyACM1 klicken, können die Einstellungen zum Gerät vorgenommen werden. Folgende Werte sind anzupassen:
Baud
115200Type
combinedName
OBP40V2
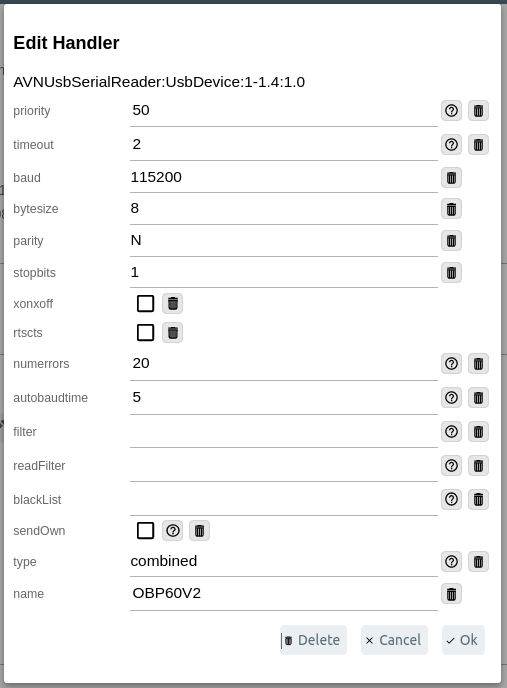
Abb.: Einstellungen für das OBP40
Durch die Änderung des Typs von read auf combined ist eine bidirektionale Kommunikation über USB mit einer Übertragungsgeschwindigkeit von 115200 Bd möglich. Das OBP40 ist nun mit AvNav verbunden. Solange Sie die selben USB-Ports verwenden, werden nach jedem Neustart des Systems die USB-Geräte korrekt zugeordnet und die Übertragungsgeschwindigkeit richtig eingestellt.
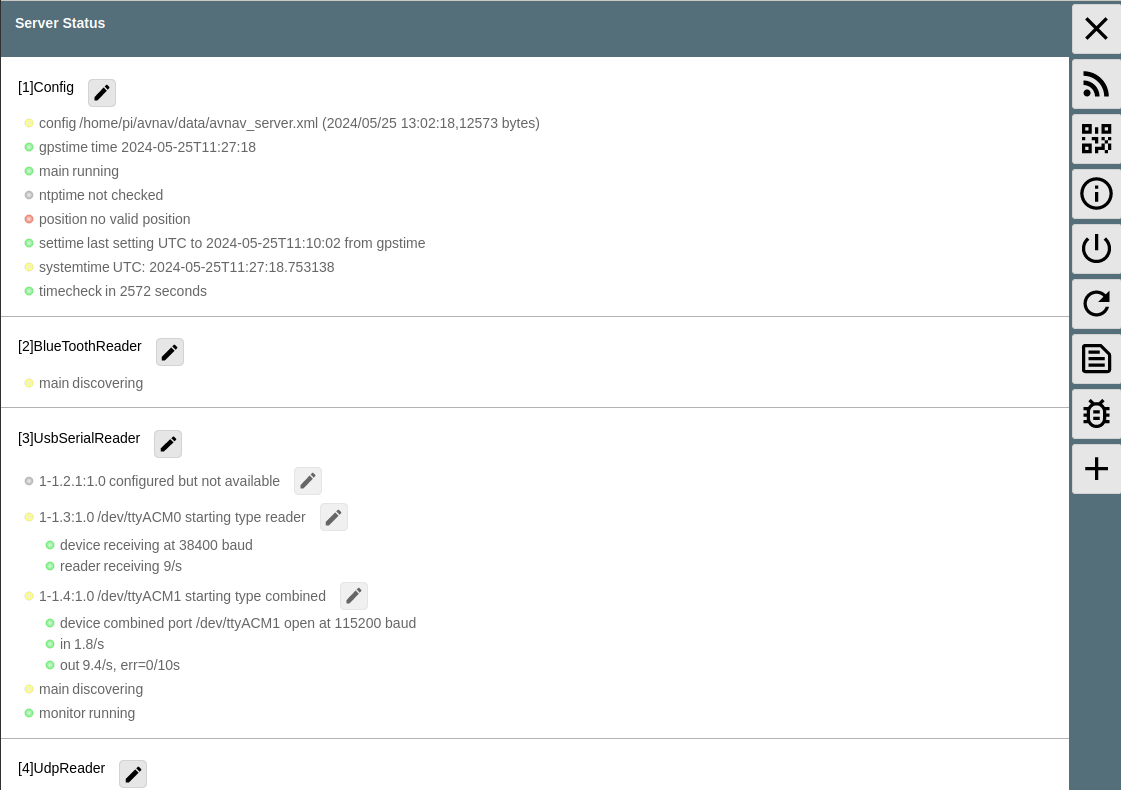
Abb.: Server-Status mit OBP40 (korrekt konfiguriert)
Beispiel AvNav auf Android-Autoradio
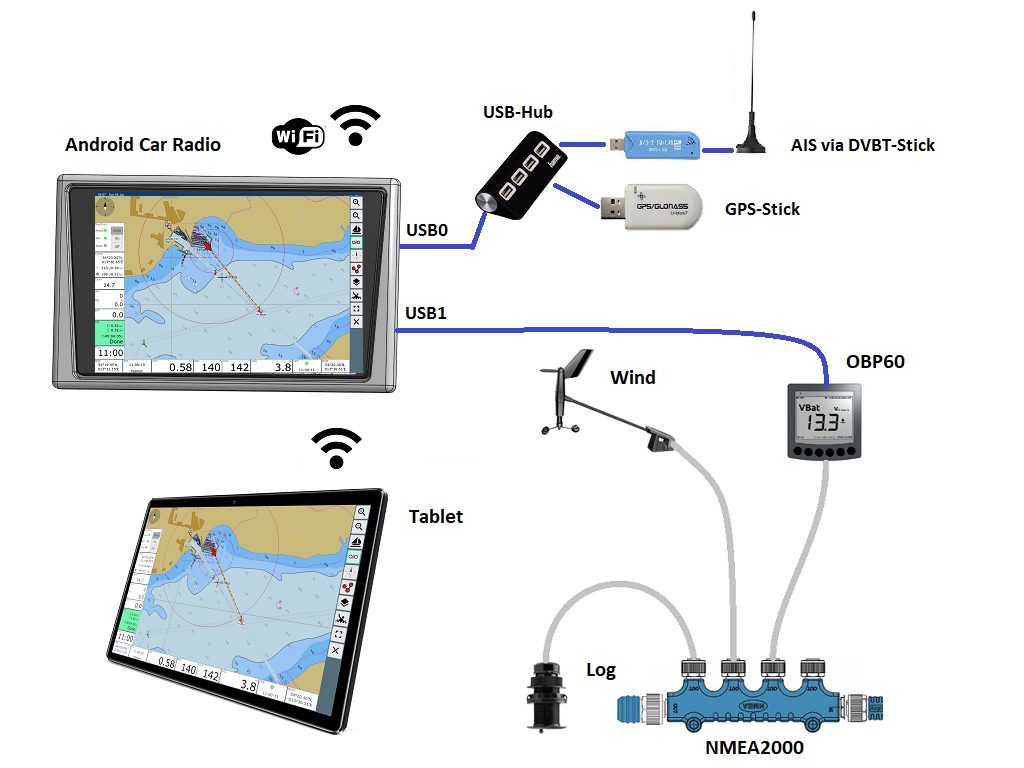
Abb.: Verbindung OBP60 - Android Autoradio AvNav
In diesem Beispiel wird gezeigt, wie man Busdaten in ein Android-Radio einspeisen kann, um die Daten dort in AvNav nutzen zu können. Für die Datenübertragung zum Android-Autoradio benötigen Sie ein USB-C zu USB-A Kabel, sofern eine passende Adapterbuchse zur Verfügung steht. In einigen Situation müssen Sie die USB-Kabel direkt über spezielle Stecker am Autoradio anschließen. Konsultieren Sie dazu das Handbuch zum Android-Autoradio und stellen Sie die USB-Verbindung wie gefordert her.
Warnung
Verwenden Sie zur Verbindung des OBP40 mit dem Android Autoradio nur hochwertige geschirmte USB-C-Kabel. Die Länge sollte 1,5 m nicht überschreiten, damit die Signalpegel nicht zu stark reduziert werden und eine hohe Übertragungsrate möglich ist. Bei Überbrückung größerer Längen verwenden sie aktive USB-Verlängerungskabel.
Abb.: Aktive USB-Verlängerung für 5 m
Hinweis
Die Konfiguration von AvNav für Android läuft in einigen Schritten verschieden zur Server-Version von AvNav auf einem Rasberry Pi ab. Beachten Sie, dass es unter Android keine automatische Konfiguration von seriellen USB-Devices gibt. USB-Geräte müssen hier immer manuell hinzugefügt werden.
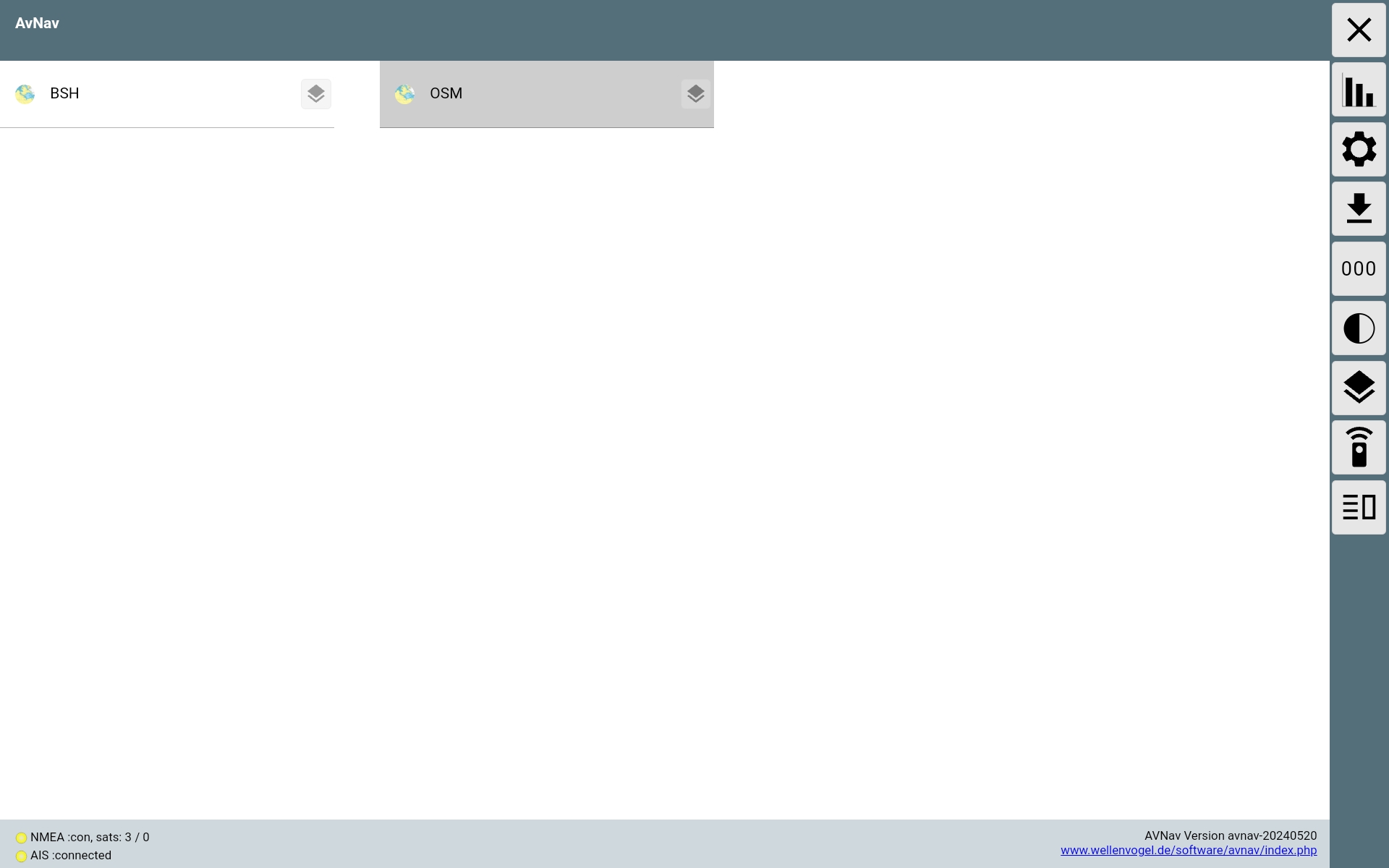
Abb.: Startseite AvNav für Android
Unter AvNav kicken Sie auf der Startseite oben rechts das Symbol mit den 3 Strichen.
Sie gelangen dann auf die Seite zum Serverstatus. Dort können Sie über das Plus-Symbol weitere Verbindungen zum AvNavServer einrichten.
Für die bidirektionale Kommunikation über USB wählen Sie UsbConnection.
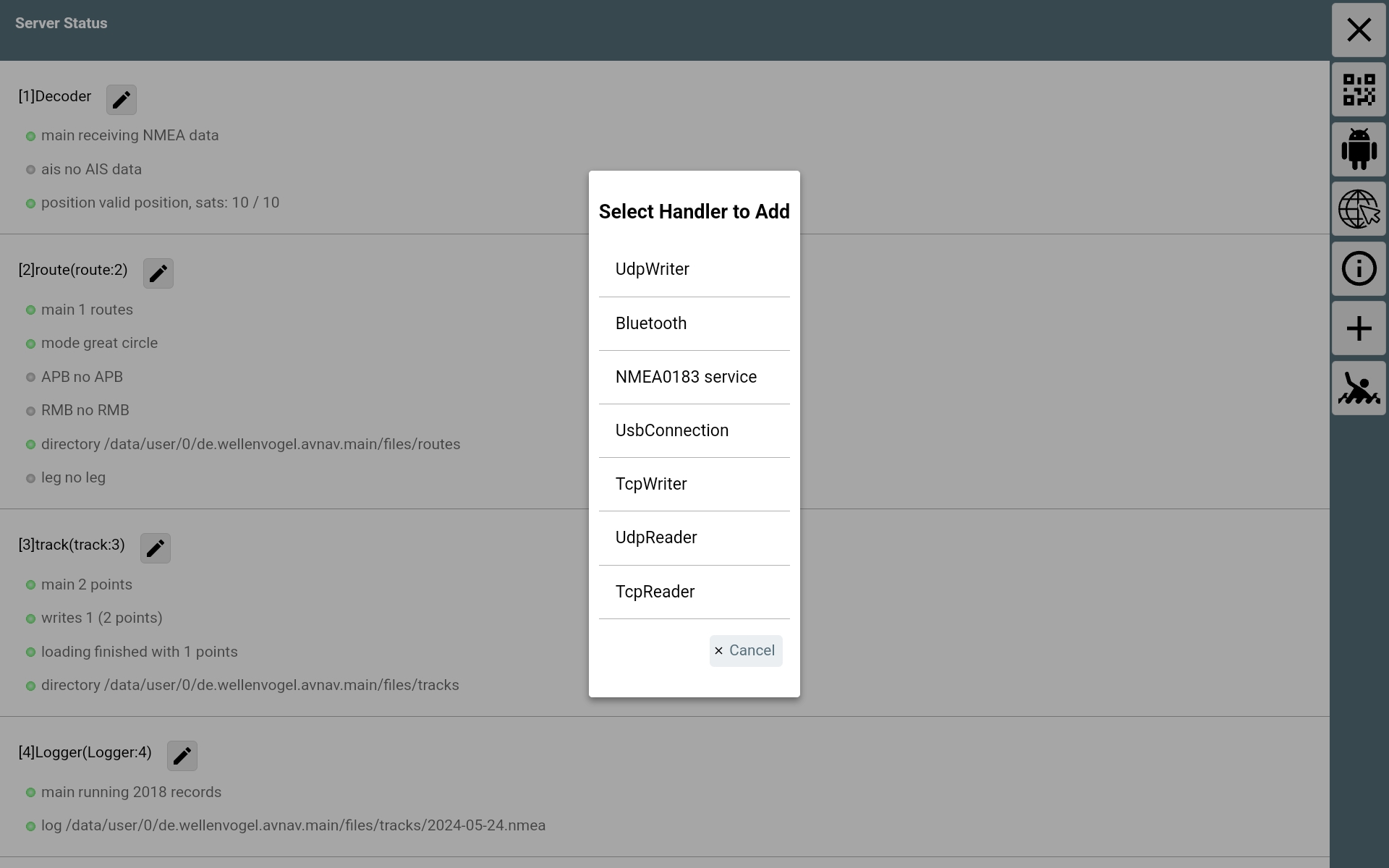
Abb.: Verbindungstypen
Unter Device wählen Sie die serielle Verbindung aus, unter der das OBP40 mit dem Raspberry Pi verbunden ist (/dev/bus/usb/001/003). Als Schnittstellengeschwindigkeit wird 115200 Bd eingestellt. Um nicht nur Daten senden, sondern auch empfangen zu können, aktivieren Sie SendOut.
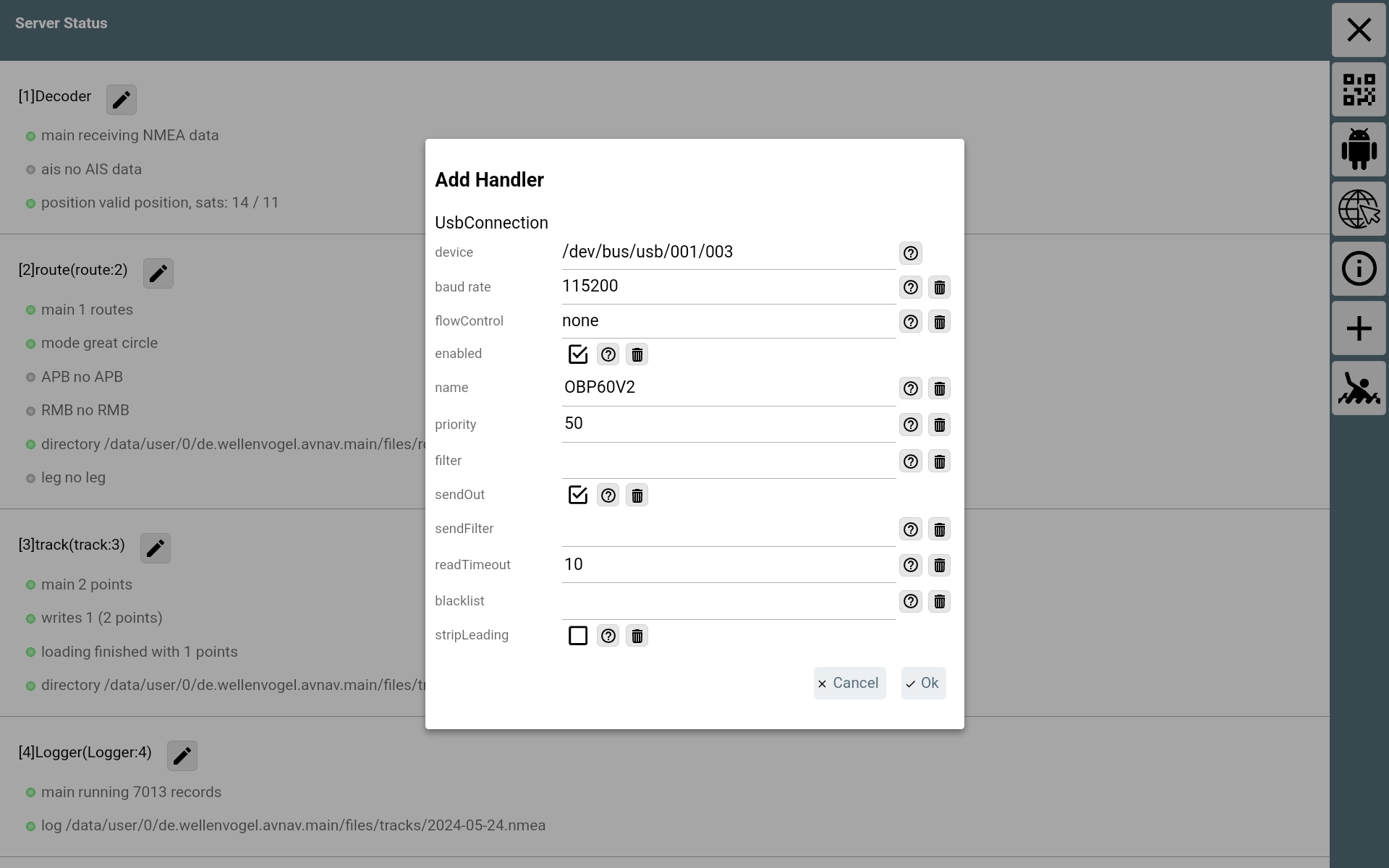
Abb.: Einstellungen zur USB-Verbindung
Nach der Übernahme aller Daten ist die neue Verbindung im Server-Status zu sehen.
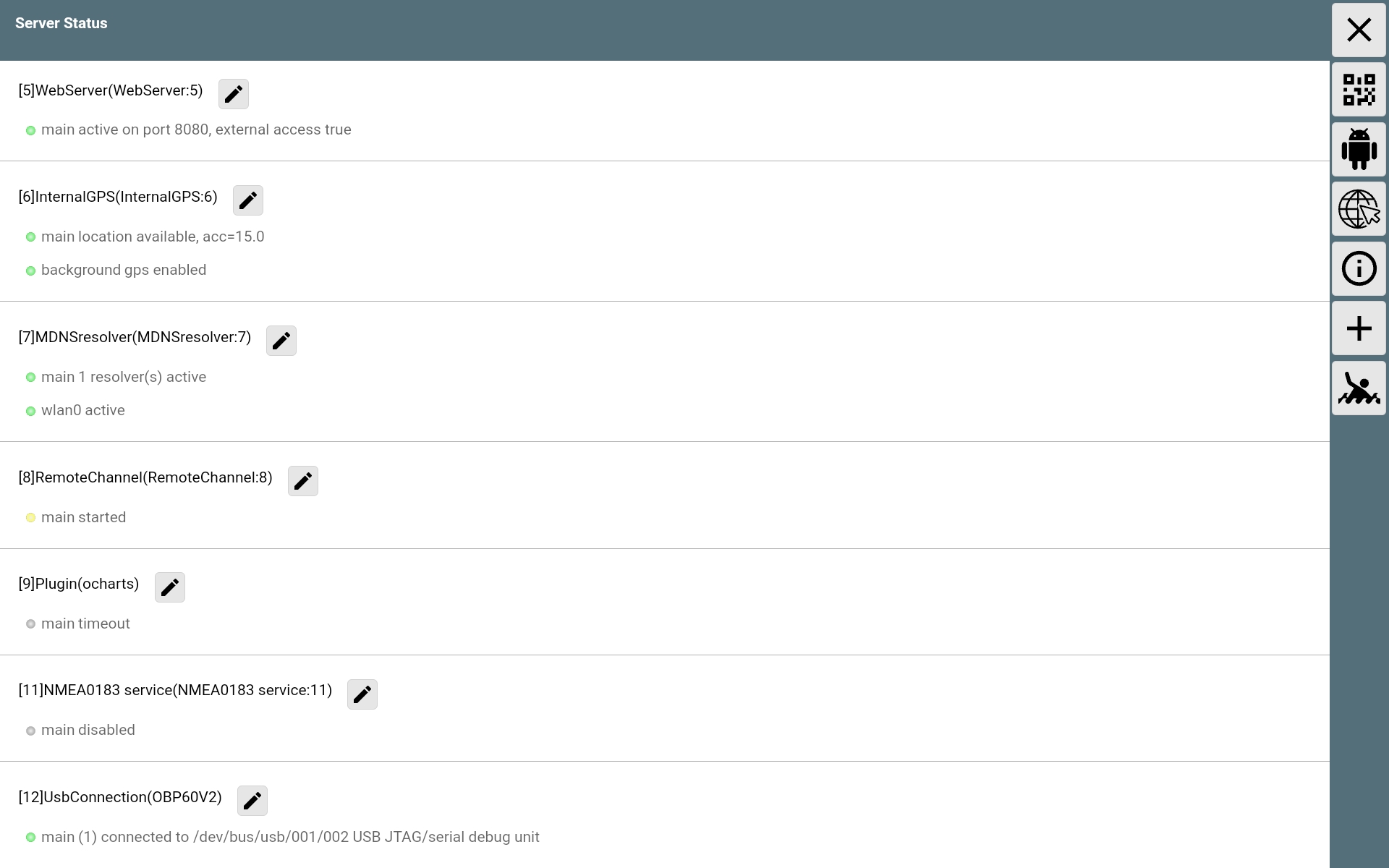
Abb.: Server-Status
Beispiel SignalK auf Raspberry Pi
SignalK kann die verfügbaren Daten im NMEA0183-Format über das WiFi-Netzwerk verteilen. Ein Vorteil dieser Varriante ist, dass kein Datenkabel zum OBP40 benötigt wird, sondern nur der Raspberry und das OBP40 im selben WLAN angemeldet sein müssen. Hierfür muss in SignalK unter Server Settings NMEA 0183 over TCP (10110) aktiviert sein.
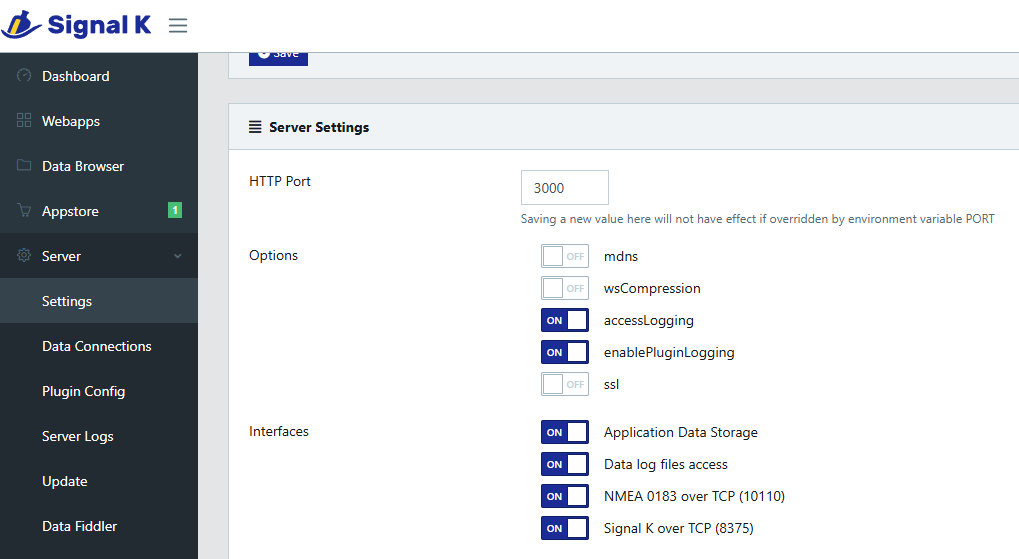
Abb.: SignalK Server
Außerdem muss das signalk-to-nmea0183 Plugin installert und aktiviert sein, in dessen Konfiguration ausgewählt werden kann, welche NMEA0183-Daten ausgegeben werden sollen.
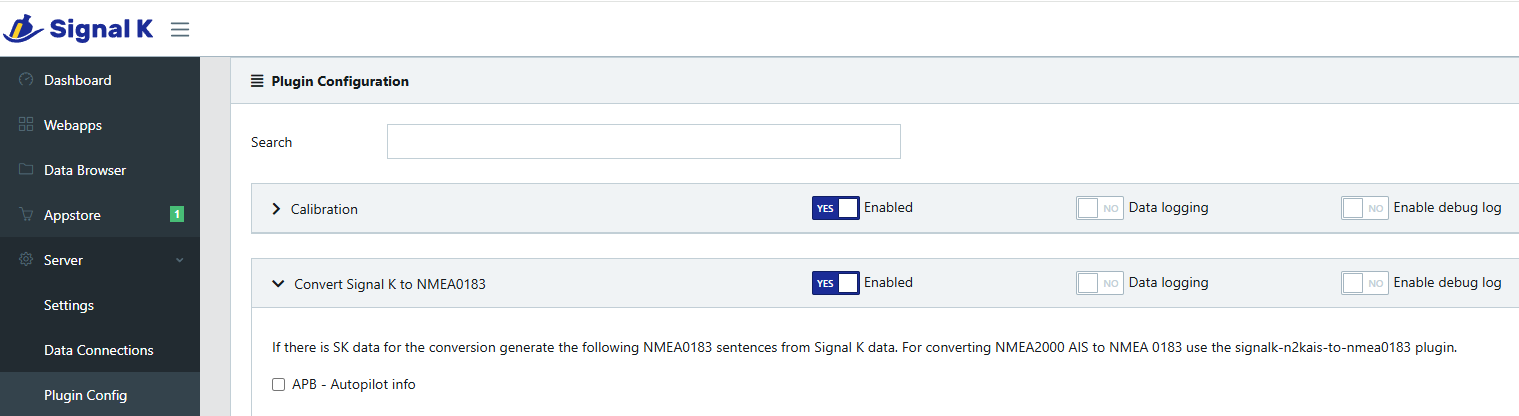
Abb.: SignalK Plungin
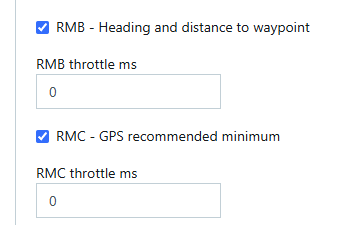
Abb.: SignalK Plungin Konfigurationsbeispiel
Um diese Funkioanlität zu testen, kann man sich auf dem Raspberry Pi mit folgendem Kommando in einem Terminal den Datenstrom anzeigen lassen: nc localhost 10110
Die so bereitgestellten Daten könenn mit dem Config - WiFi Client des OBP40 abgerufen werden und stehen dann auf der Seite Data und zur Anzeige in den einzelnen Seiten ausgewählt werden.
Beispiel OpenPlotter auf Raspberry Pi
OpenPlotter stellt alle verfügbaren Daten über SignalK zur Verfügung. Von dort könenn die Daten im NMEA0183-Format mit dem TCP-Client abgerufen werden, oder mit dem signalk-to-nmea2000 Plugin übertragen werden.
Beispiel Navionics auf Android-Autoradio
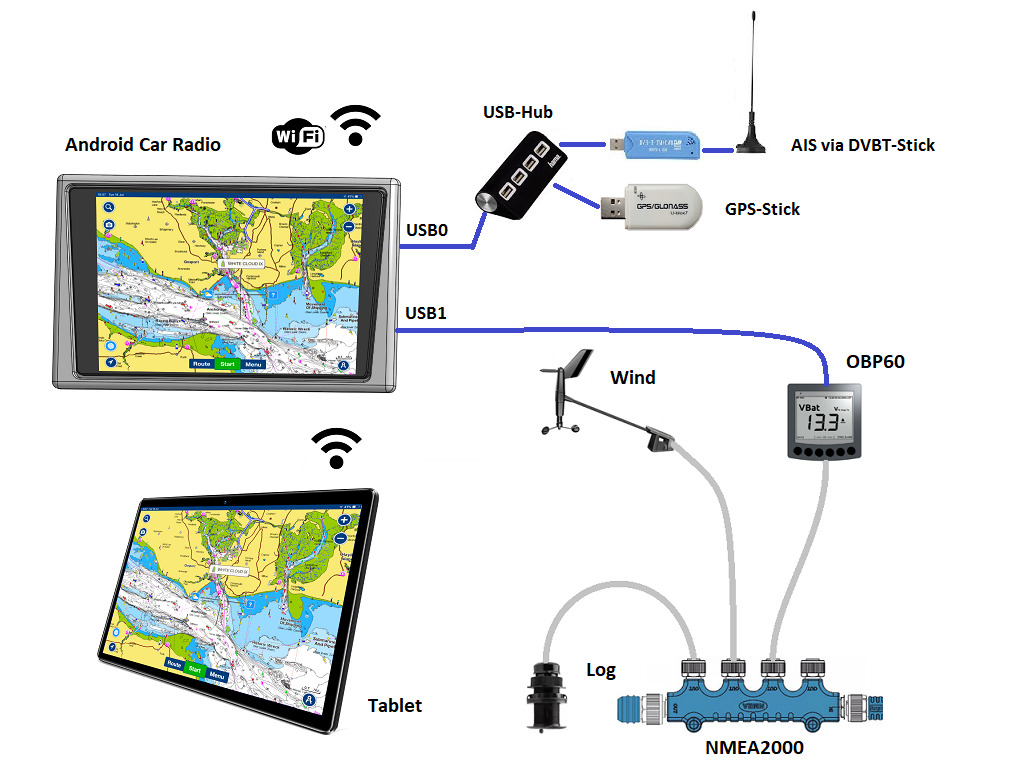
Abb.: Verbindung OBP60 - Android Autoradio Navionics
In dem Beispiel wird gezeigt, wie man Busdaten in ein Android-Radio einspeisen kann, um die Daten in Navionics nutzen zu können. Für die Datenübertragung zum Android-Autoradio benötigen Sie ein USB-C zu USB-A Kabel, sofern eine passende Adapterbuchse zur Verfügung steht. In einigen Situation müssen Sie die USB-Kabel direkt über spezielle Stecker am Autoradio anschließen. Konsultieren Sie dazu das Handbuch zum Android-Autoradio und stellen Sie die USB-Verbindung wie gefordert her.
Bemerkung
Bedingt durch die Navigationssoftware können nicht alle Busdaten in Navionics verwendet werden. Aktuell lassen sich nur einige Daten nutzen. Die nachfolgende Liste zeigt die derzeitig verarbeitbaren NMEA0183 Sentences.
AIVDM (AIS-Daten)
AIVDO (AIS-Daten)
DBT (Tiefe unter Sensor)
DPT (Korrigierte Tiefe)
GGA (Position)
GLL (Position)
RMC (Notwendige minimale Navigationsdaten - Zeit, Position, Kurs, Speed)
VTG (Kurs und Speed über Grund)
ZDA (Uhrzeit und Datum)
I2C-Bus
Beispiel I2C Ruderlagensensor
Es wird an dieser Stelle gezeigt, wie man einen I2C-Winkelsensor als Ruderlagensensor am I2C-Bus benutzt. Grundsätzlich kann der Winkelsensor für folgende Winkelmessungen benutzt werden:
Ruderlage
Windrichtung
Mastausrichtung bei drehbaren Masten
Kielneigung
Winkelsensor für Trimmklappen oder Foils
Großbaum
Als I2C-Winkelsensor wird eine kleine Platine mit einem AS5600 verwendet, die auf Adresse 0x36 angesprochen werden kann. Der AS5600 ist ein magnetischer Winkelsensor, der die Ausrichtung eines Magnetfeldes erkennt. Über einen diametralen Magneten, dessen Magnetfeld in der Scheibenebene geteilt und mit der Ruderachse verbunden ist, kann der Ruderausschlag gemessen werden. Der Magnet entspricht dabei der Drehachse des Ruders.
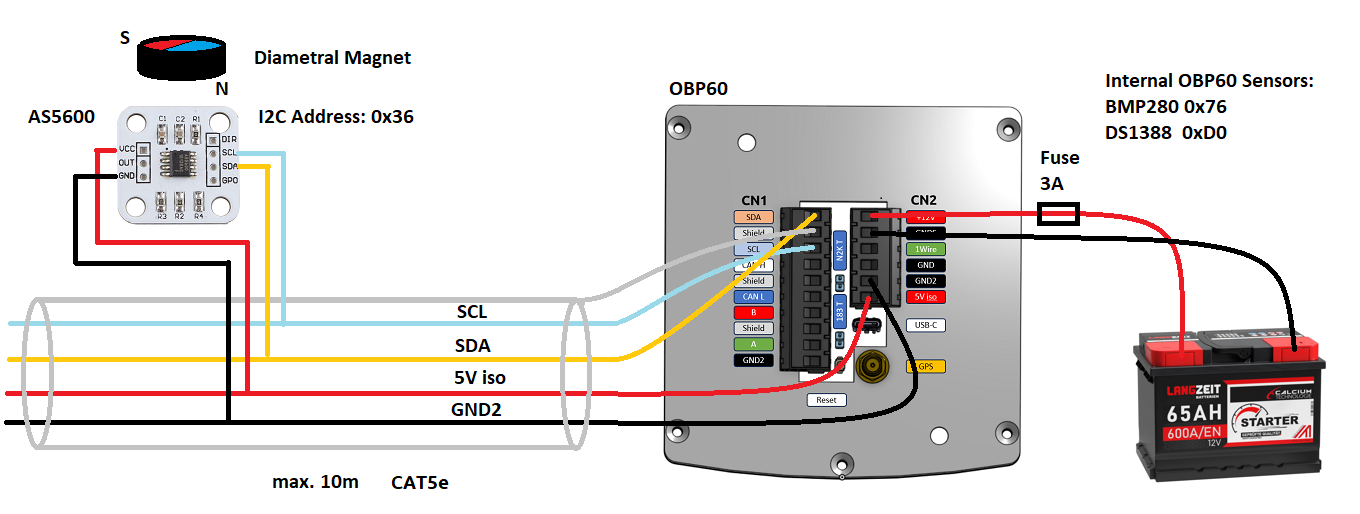
Abb.: I2C-Anbindung magnetischer Winkelmesser AS5600
Bemerkung
Bedenken Sie, dass nur ein AS5600 als Winkelmesser verwendet werden kann, da die I2C-Adresse nicht änderbar ist. Das Verbindungskabel sollte ein geschirmtes Kabel sein und eine Länge von 10 m nicht überschreiten.
Folgende Einstellungen sind im OBP60 vorzunehmen.
Einstellung |
OBP60 |
|---|---|
Rot. Sensor |
AS5600 |
Rot. Function |
Rudder |
Rot. Offset |
0 |
Je nach Erfordernissen muss noch der Offset über Rot. Offset eingestellt werden.
1Wire-Bus
Über den 1Wire-Buss lassen sich bis zu 8 Temperatursensoren des Typs DS18B20 anschließen. Damit können Temperaturen im Bereich von -55°C bis 125°C an verschiedenen Stellen im Boot gemessen werden. Die Sensoren gibt es als elektronisches Bauteil in Transistorform (TO-92) oder in einer wasserdichten Metallhülse mit Kabel. Die letztere Variante eignet sich am besten im Marinebereich.

Abb.: DS18B20 TO-92

Abb.: DS18B20 Wasserdicht
Wenn Sie im Boot an verschiedenen Stellen Temperaturen messen möchten, erstellen Sie sich ein Backbone mit Abzweigdosen und schließen die Sensoren an den Abzweigdosen an. So entstehen im 1Wire-Bussystem nicht ungewollt lange Stichleitungen.
Konfigurationsbeispiel 1Wire
Im unteren Bild ist eine Schaltung zu sehen, in der 4 DS18B20 verwendet werden. Die Sensoren sind dabei über einen Spannungswandler LM7805 direkt versorgt. Diese Schaltung funktioniert für alle Sensoren, die am Markt erhältlich sind.
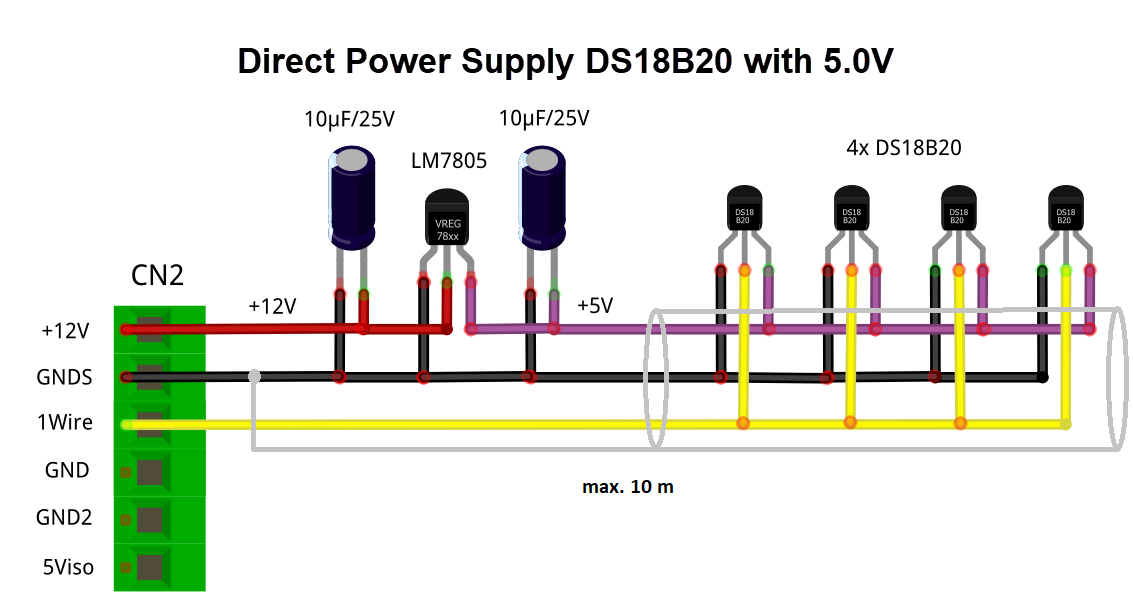
Abb.: 1Wire-Anbindung von externen Temperatur-Sensoren (direkt versorgt)
Einstellung |
OBP60 |
|---|---|
Temp. Sensor |
DS18B20 |